Agricultural Crop Health Monitoring Using a Mobile Robot
In this project, an agricultural robot, which could navigate between rows and at the end of the row turn to the next row autonomously. The proper detection of the disease using image processing will be done. Spraying of the respective pesticides for the disease can be done throughout the field using the mobile robot without much help of man power.
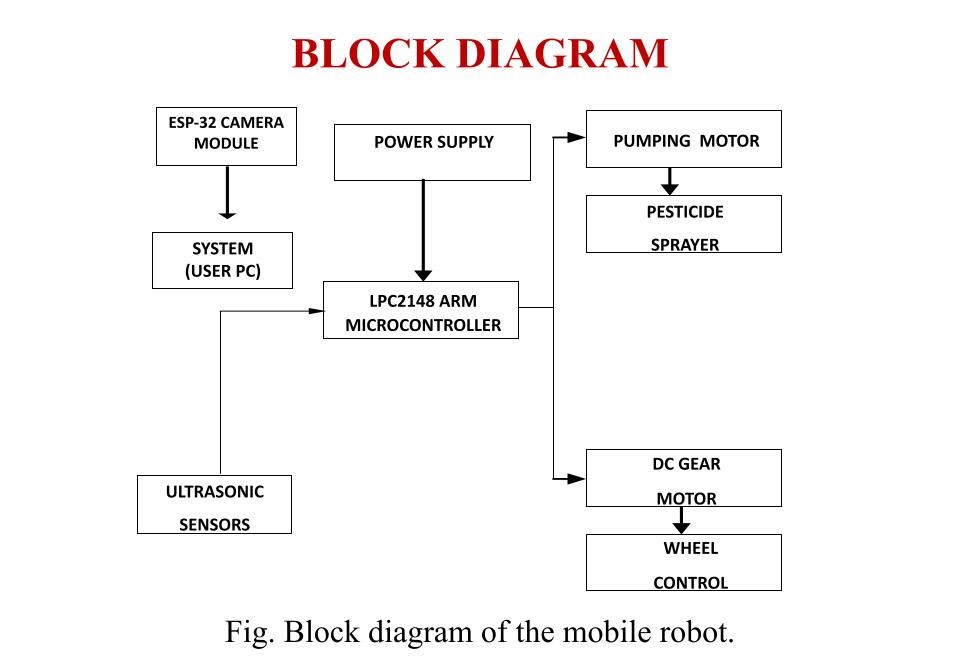
Block Diagram: